


Archived Geocache GC3CT62 (Night Cache)
"In geheimer Mission"
The technical stages of this geocache disappeared several times I decided to archive this cache.
Because there has been a lot of effort in developing this cache I thought it might be interesting for the croud to see what's inside the box.
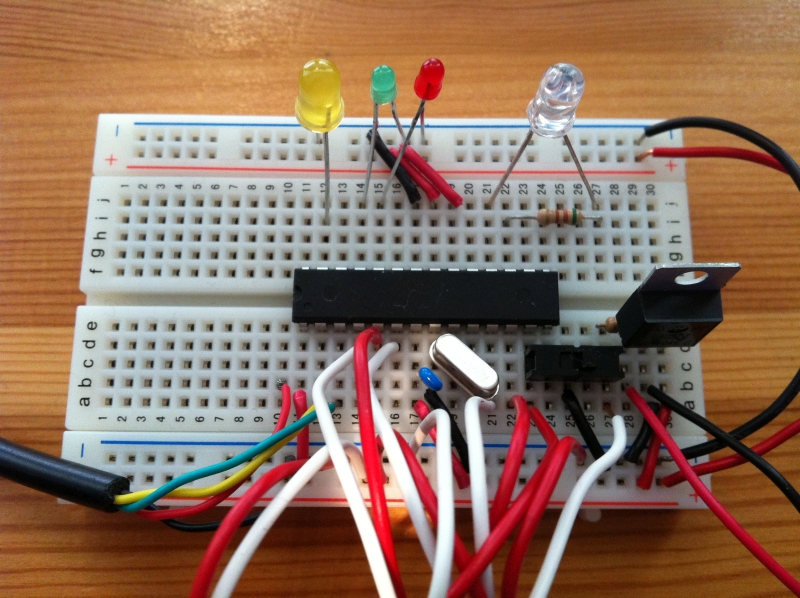
First assembling on the breadboard
The first step was to put everything together on the breadboard and check if I realize what I had in mind.
The goal was to put a LED as Input and monitor if a light source is lighting on it or not.
Additionally I put some more colored LEDs to show if the light is detected or not.
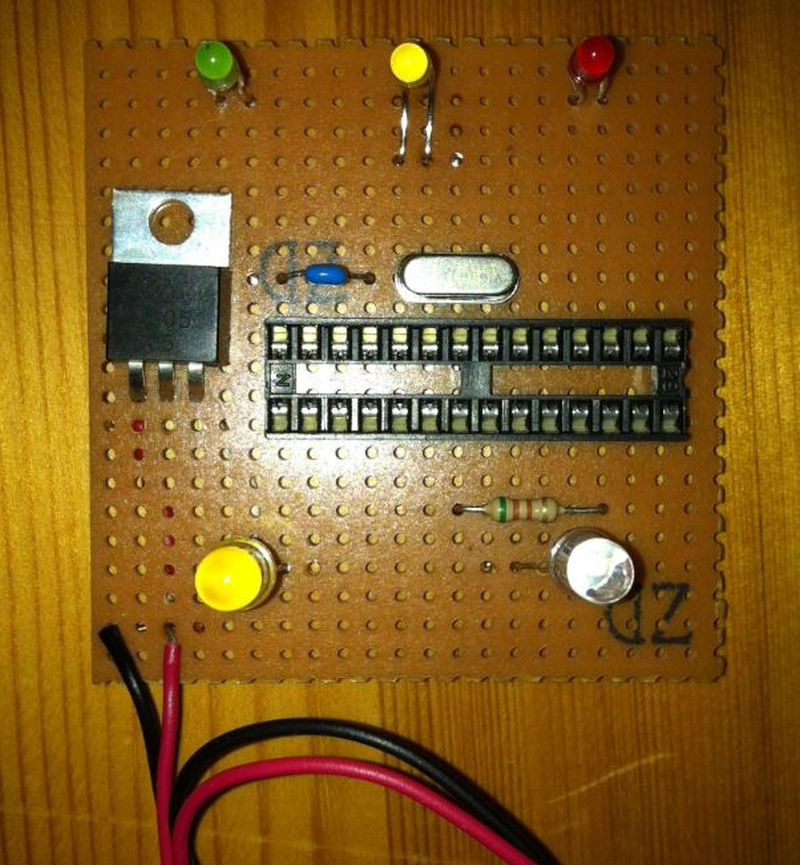
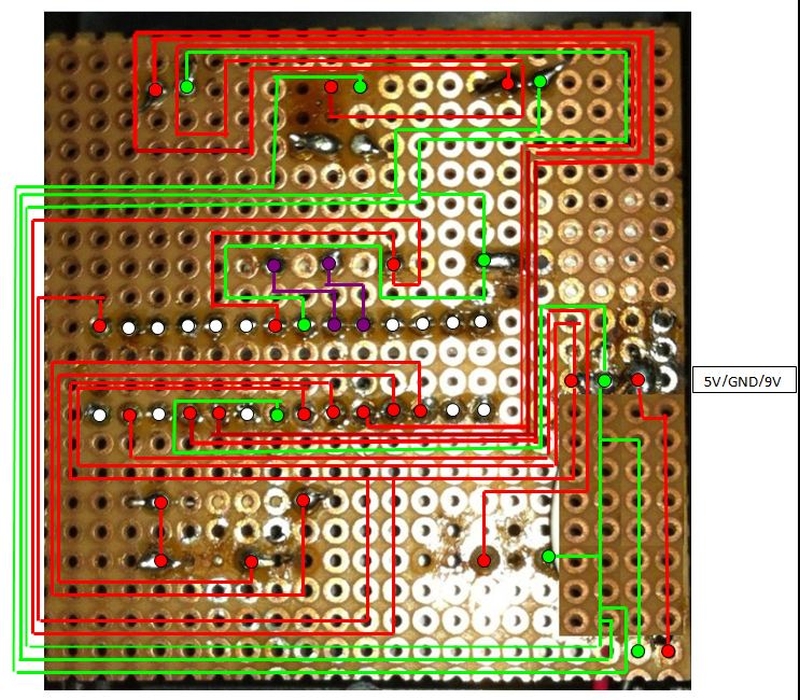
Drawing the PCB for the project
This was my very first project ever. I used a breadboard to wire it the hard way.
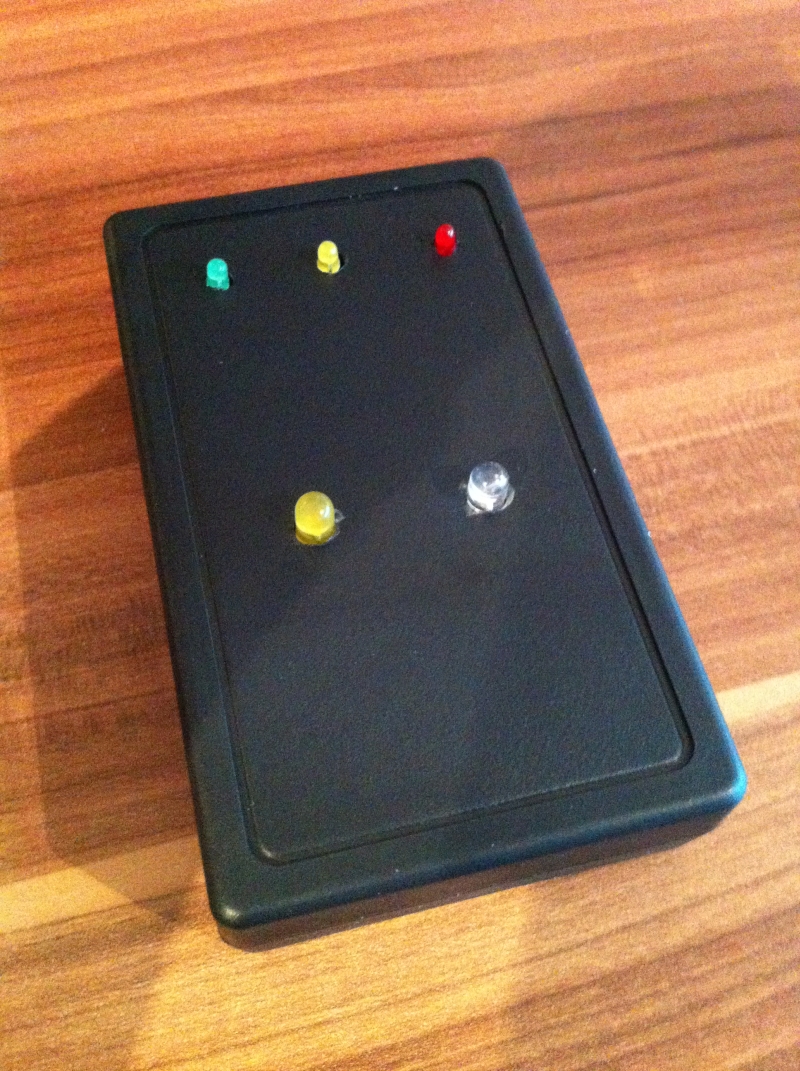
Putting everything in a nice frame
After the PCB was ready and the breadboard constellation worked, it was time to put everything in a nice frame.
Driling some holes for the 5 LEDs and everything was done.
Writing the code
With programming the ATMega168 the parts would not do a thing.
As power supply I used a 9V battery.
Here you can see the tiny and simple code which I used for that cache.
Additionally you can watch the video below to see how it worked in action.
{code lang:c id:29 title:"Main Program" hidden:false}}{/code}